Research
Marine Robotics and Unmanned Vehicles
Underwater Bridge Inspection
There are about 575,000 bridges in the U.S. and approximately 85% of them span waterways. Each bridge must be inspected at least once every 2 years! Current inspection methods involve the use of visual and tactile examination by divers as the primary method used for underwater bridge inspection. This approach typically requires specialized dive teams to touch or feel bridge structures to detect flaws, damage or deterioration – it can be very difficult to quantify results of these techniques. A real-time acoustic imaging system has been deployed on an Unmanned Surface Vehicle (USV) platform to perform underwater bridge inspection. We are exploring the use of advanced robotics techniques, such as: cooperative sensing/multi-session mapping; advanced map building techniques; 3D obstacle avoidance and trajectory planning; improved Human-Robot Interaction for sliding autonomy (continuously switching between teleoperation and complete autonomy) and human robot interfaces; and advanced automatic control techniques, including wind feed forward control and control allocation for station-keeping (see below).
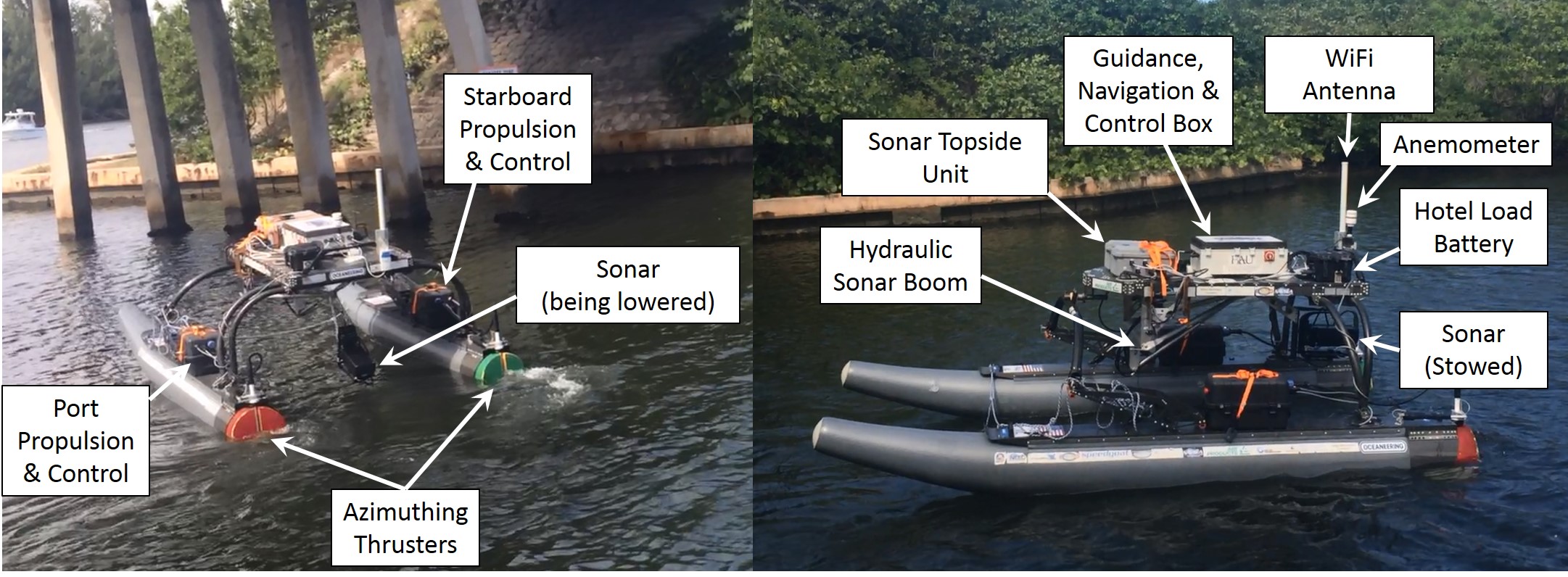
Our WAM-V USV16 outfitted for U/W Bridge Inspection Experiments
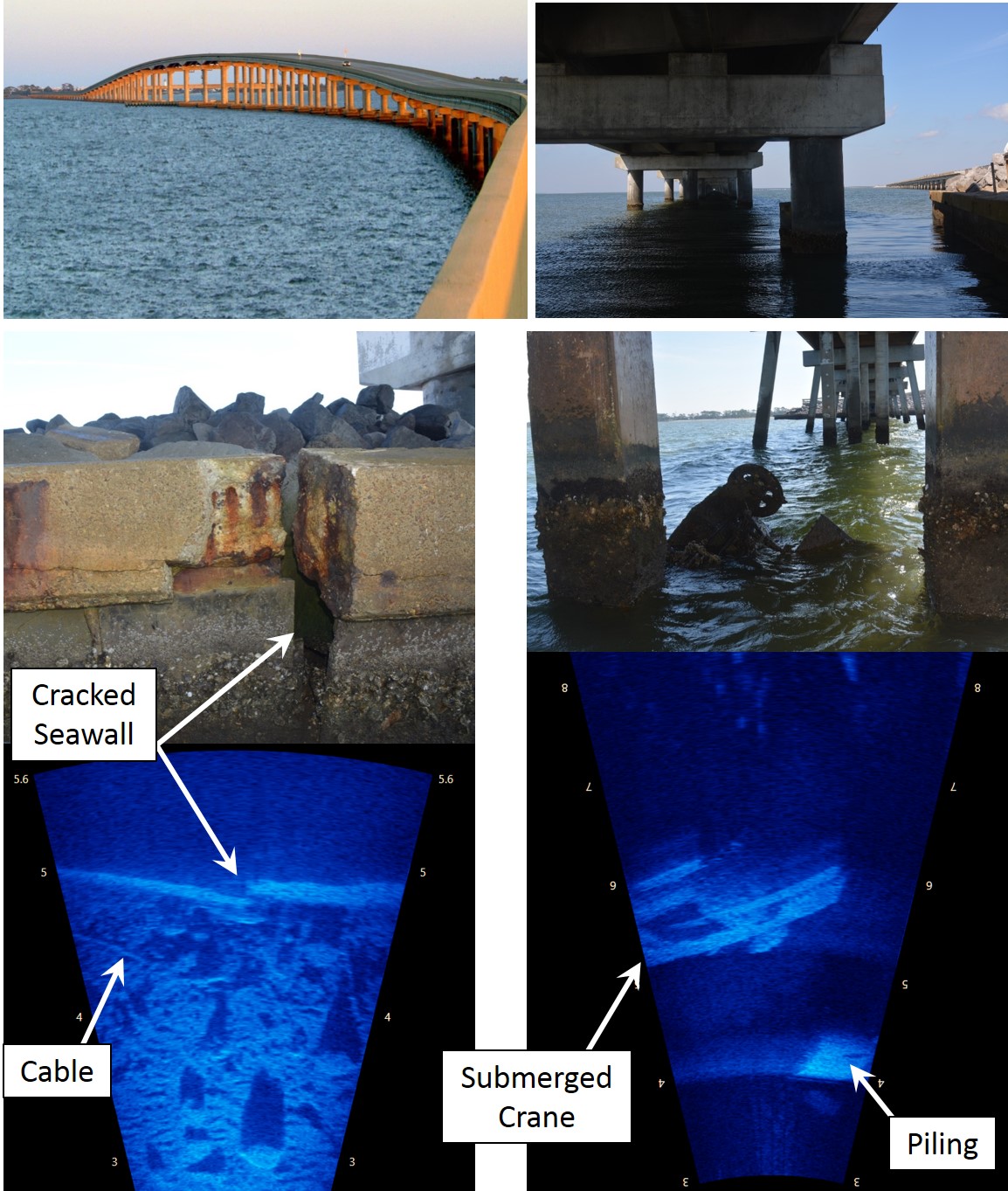
Top Left: St. George Island Causeway, FL. Top Right: Under causeway (old bridge on right). Bottom Left: Crack in seawall under causeway – bottom debris and steel cable visible on seafloor. Bottom Right: Sunken crane leaning against pier supports of old bridge in about 40’ of water.
Experimental Evaluation of Automatically Generated Behaviors for Autonomous USV Operations
In collaboration with S. K. Gupta, University of Maryland
The widespread implementation of USVs requires that they: operate in complex and dynamically changing environments; be deployed in cluttered areas where both small- and large-scale commercial and civilian boat traffic exists; and that they be capable of robust real-time obstacle avoidance and path planning. Most USVs not truly autonomous but rely on waypoint navigation and scripted operations and are therefore limited to use in fairly predictable environments. The ability of a USV to intelligently handle diverse tasks and contingencies requires a largetoolbox of autonomous vehicle behaviors. The manual development and tuning of behaviors requires substantial effort – it is not possible to pre-program a USV for every potential scenario it might encounter. Here, we experimentally explore the automatic generation of context-dependent intelligent behaviors.
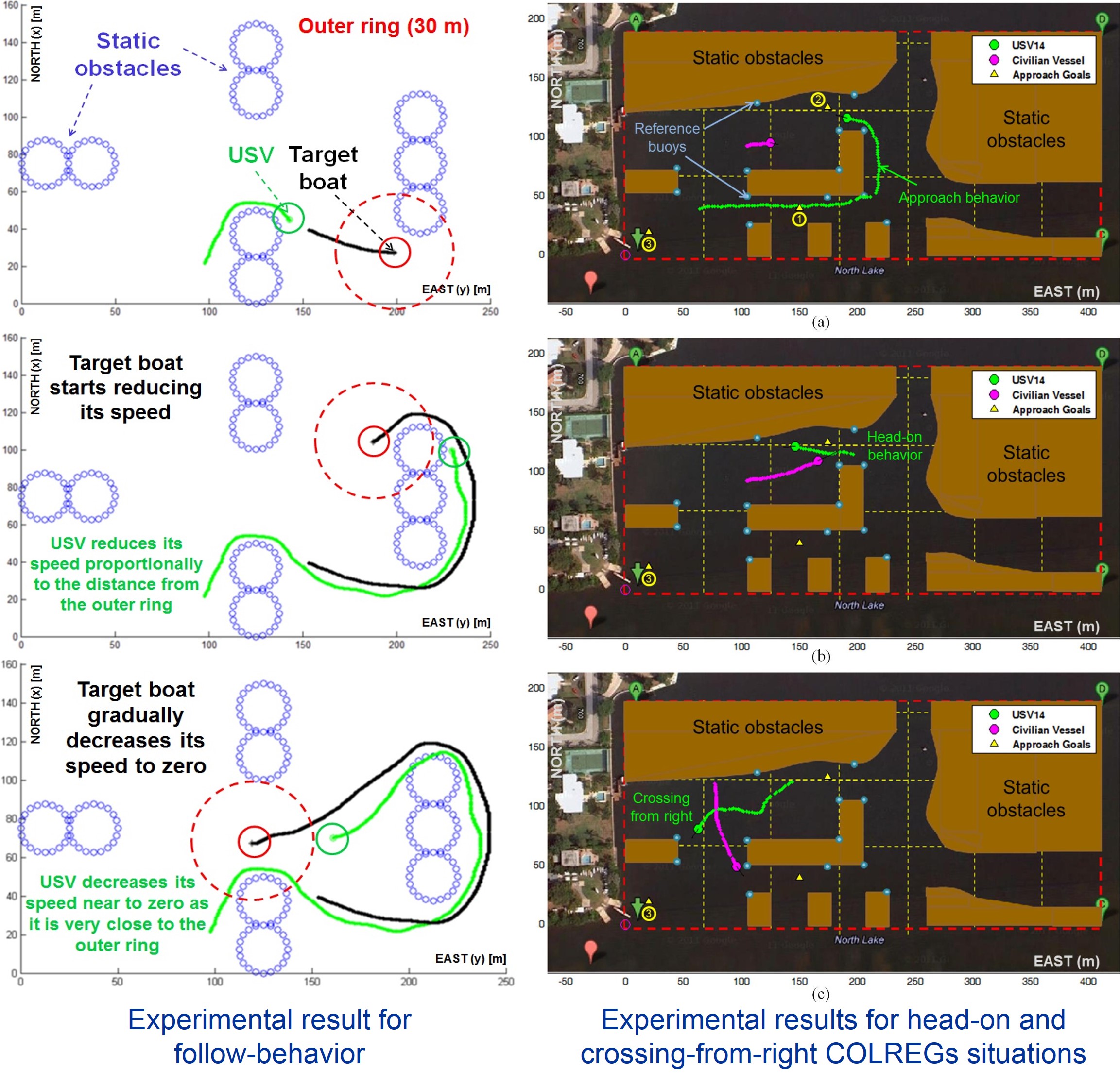
Four automatically-generated USV behaviors were demonstrated in on-water tests within a complex, static obstacle field with motion constrained to adhere to the International Regulations for the Prevention of Collisions at Sea (COLREGs):
- Approach (USV approaches a fixed target)
- Follow (USV approaches a moving target)
- Single COLREGs-Compliant Crossing
- Multiple COLREGs-Compliant Crossings
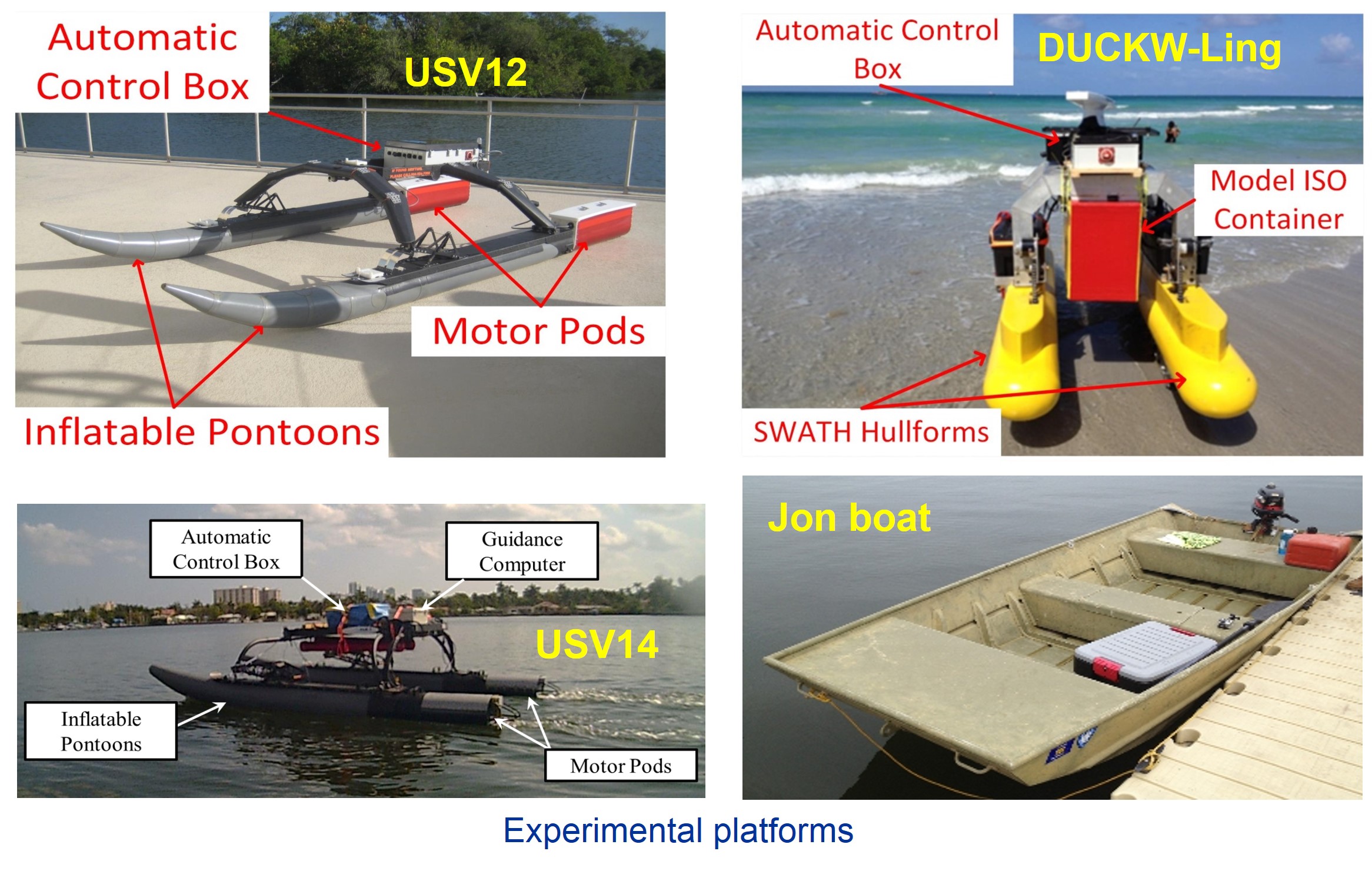
Experiments were conducted using reactive and deliberative trajectory planners implemented on a USV14, which interacted with other vessels including: a WAM-V USV12, an amphibious USV (the DUKW-Ling), and a manned jonboat.
Multiple low-level USV heading and speed controllers, varying in complexity from proportional control to nonlinear backstepping control, were tested with the planner.
High planning performance achieved by searching within a resolution-adaptive space of the USV’s candidate motion goals.
Prior to on-water implementation, system was fine-tuned in simulation.
Wind Feedforward and Stationkeeping USV Control
The ability of unmanned surface vehicles (USVs) to maintain a fixed orientation and position for an extended period of time is essential for a variety of applications such as acoustic and optical localization and automatic launch and recovery of other systems. The need for station-keeping capabilities on USVs requires collaboration between the controller and the propulsion system, both designed to allow the vehicle to perform this challenging maneuver. Small external perturbations, such as wind, waves and current, can have tremendous effects on low weight USVs. These can negatively affect the USV ability to hold its state, resulting in large errors or oscillations. A robust controller capable to account for unmodeled dynamics, which lead to significant deviations between simulated and experimental results, is therefore essential. After an appropriate propulsion system had been designed and installed on a USV, several station-keeping controllers were implemented and tested. Experimental testing of these controllers in environments of uncertain wind, current and wave disturbances show that the vehicle is best controlled by a nonlinear, backstepping, Multi-Input Multi- output (MIMO) PD controller. A Lagrangian multiplier method was used for control allocation. It is shown that a USV equipped with azimuthing electric propellers is capable to reach and maintain a specific configuration of heading and position for a period of ten or more minutes.
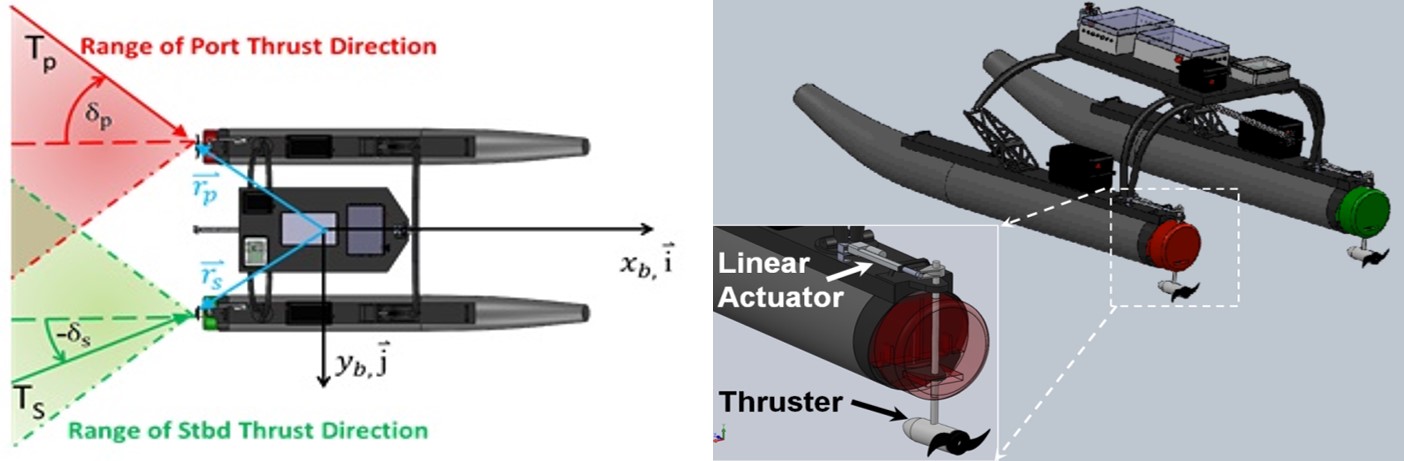
Azimuthing thruster configuration for thrust vectoring – vehicle is overactuated in this configuration.

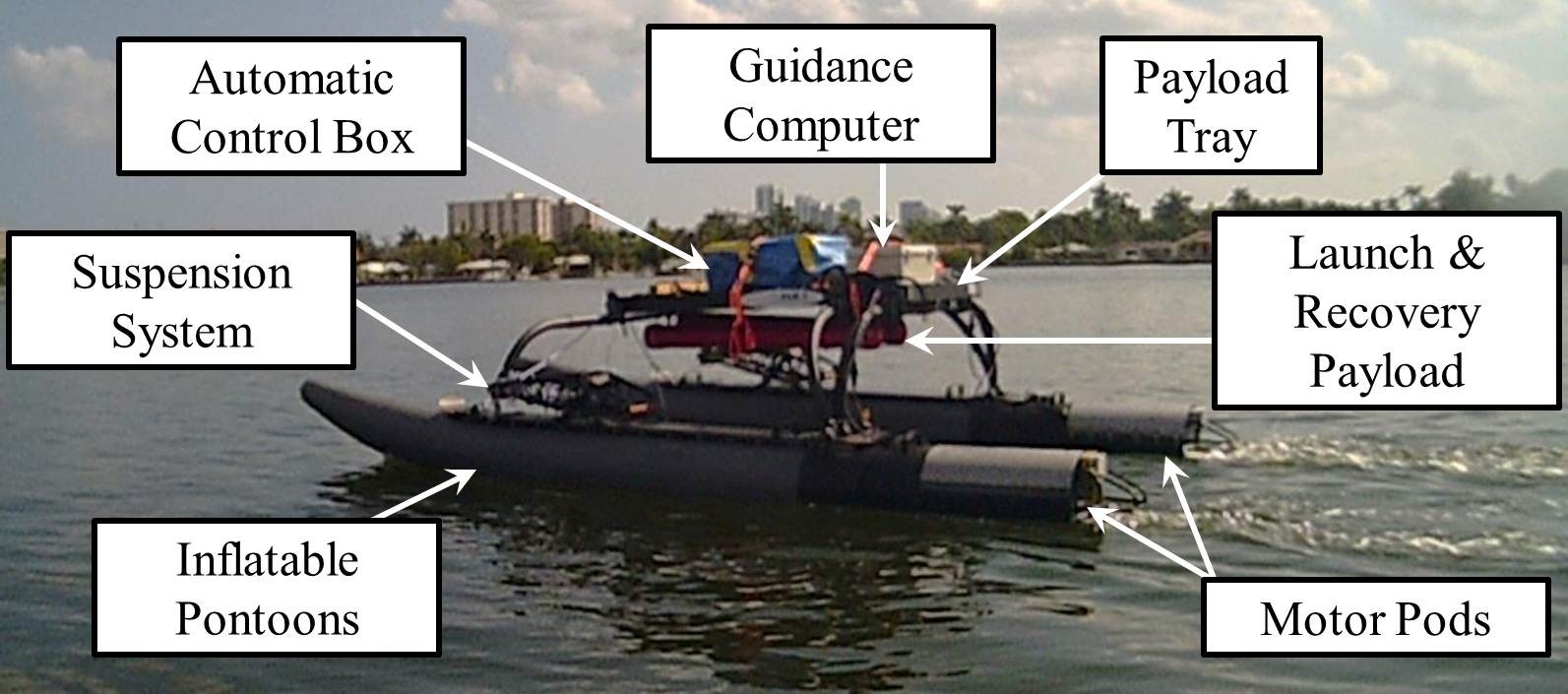
The WAM-V USV16 configured for wind feedforward control.
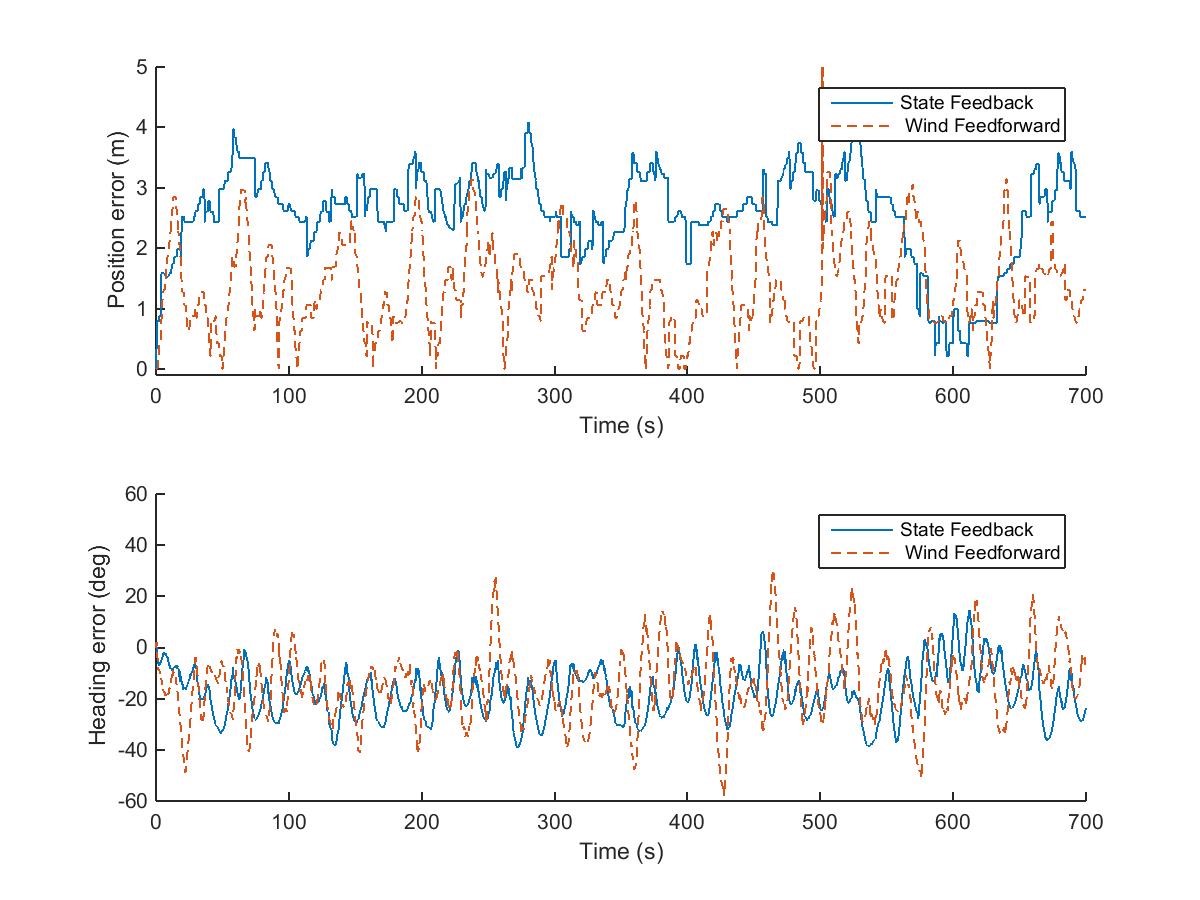
Position and heading errors for backstepping station-keeping controller with/without wind feedforward control on the USV in a cross wind.
Automatic Launch & Recovery of an Autonomous Underwater Vehicle (AUV) from an Unmanned Surface Vehicle (USV)
Experimental testing of a WAM-V USV14 has been performed to evaluate the performance of several low-level controllers when displacement and drag properties are time-varying and uncertain. The USV is a 4.3 meter long, 150 kilogram wave adaptive modular vehicle (WAM-V) with an inflatable twin hull configuration and waterjet propulsion. Open loop maneuvering tests were conducted to characterize the dynamics of the vehicle. The hydrodynamic coefficients of the vehicle were determined through system identification of the maneuvering data and were used for simulations during control system development. The resulting controllers were experimentally field tested on-water. Variable mass and drag tests show that the vehicle is best controlled by a model reference adaptive backstepping speed and heading controller. It was found that when an adaptive algorithm is implemented for the surge control subsystem of the modified backstepping controller, the effects of variable mass and drag are mitigated.
The WAM-V USV14 Unmanned Surface Vehicle underway in the Intracoastal Waterway (ICW).
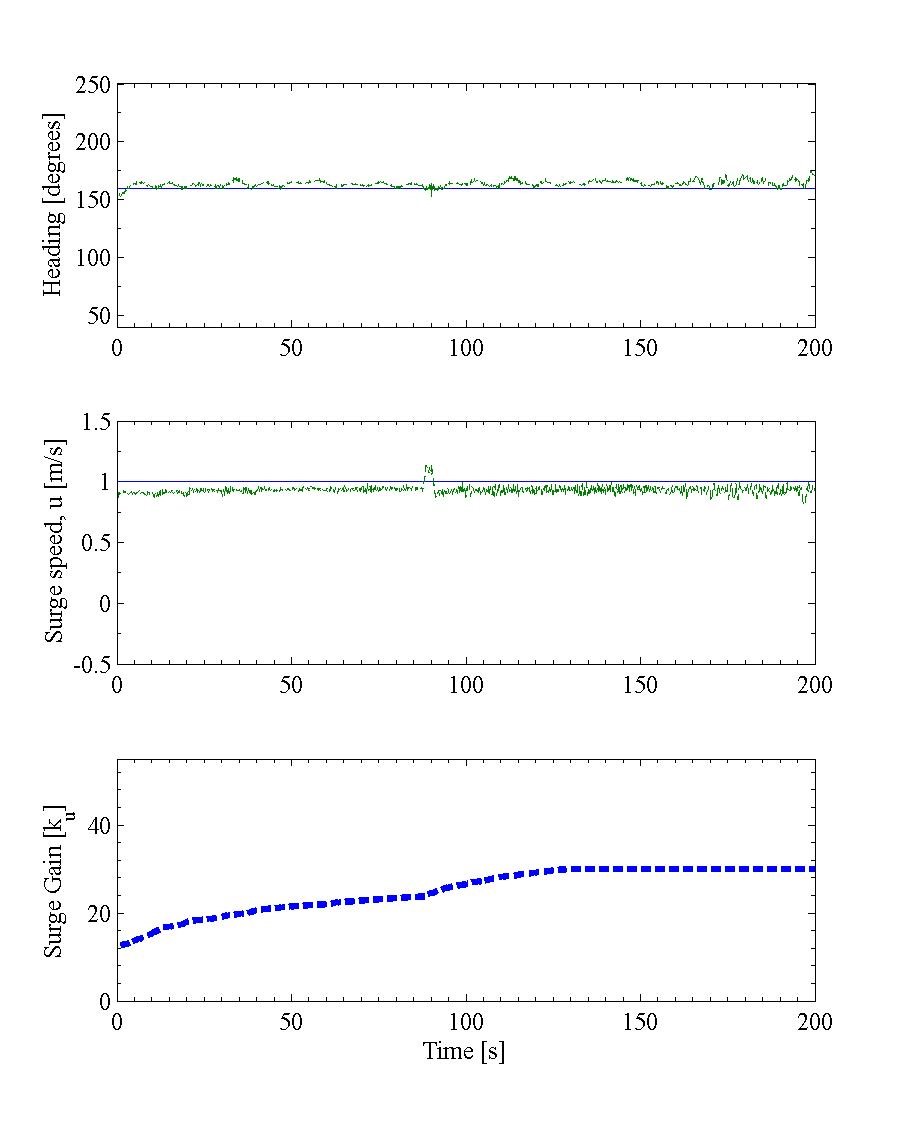
Results for the variable mass and drag test using the adaptive backstepping controller. The reference command ( | ) and recorded ( ¦ ) signals are overlaid in the top and middle plots. A PVC device simulating an AUV was dropped into water at about 75 seconds.