We are interested in the fluid dynamics of biological and bio-inspired systems. In particular, we are interested in understand how flexible bodies can modify and control flow structures through changes in their shape, kinematics and material properties. Below are different projects in the lab that address this broad question.
Research
Our research focus in the study of biological propulsion, biomimetics and flow control. Swimming and flying animals have a remarkable ability to navigate through complex environments. As they propel themselves, they interact with the surrounding fluid medium. This fluid-animal interaction during locomotion is a fundamental factor in how animals actuate their muscles as well as how they have evolved. In order to incorporate biological-based designs into the next generation of underwater or air vehicles, it is crucial to understand the role of fluid dynamics in animal locomotion. Furthermore, the results of this work will help us to understand the interconnection between fluid dynamics and the development of the morphology, sensory system and motor control of animals.
Questions that we address through our research:
– How do morphology, sensory system, and motor control in an organism interact with its surrounding fluid to obtain a desired motion direction or to control the fluid flow?
– What is the role of flexibility and active modulation of compliance on force generation, flow structure, and propulsion performance?
– How do flying and swimming animals react to perturbations in the flow, and how do they stabilize their motion? How could we effectively mimic those behaviors in underwater and air vehicles?
– How can we incorporate novel strategies for energy harvesting based on biomimetic studies?
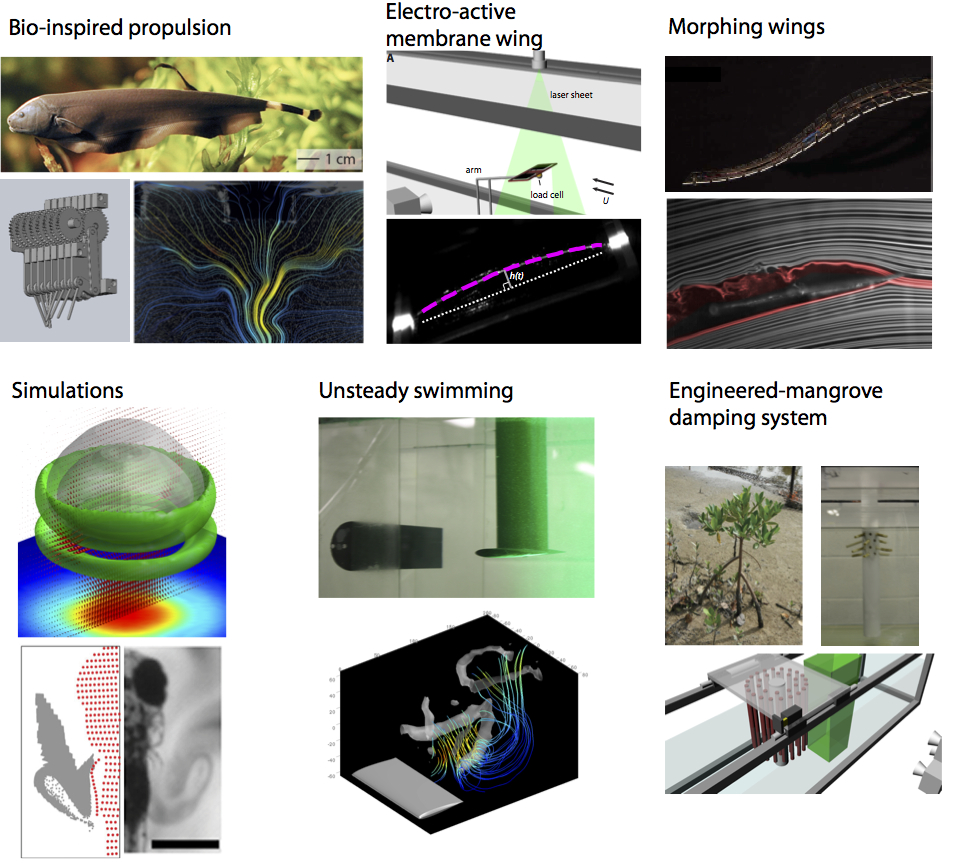
Projects:
Hydrodynamics of elongated fin propulsion
Biological propulsions have the potential to guide novel technology in the development of research vessels used in the exploration of complex areas such as littoral and reef areas. An ideal biological propulsion system to explore these environments is the use of an elongated fin. In this type of propulsion an organism undulates one or multiple elongated appendages to generate thrust. In this work, we study the hydrodynamics and flow control of elongated fin propulsion.
Wing membranes with adaptive compliance
Some animals such as bats are able to modulate the stiffness of their wing membranes with the contraction and relaxation of chordwise muscles along their wings. This adaptive compliance might allows them to control their aerodynamic performance. Electroactive polymers have the potential to develop similar artificial muscle actuators and adaptive compliance wings for highly maneuverable air vehicles. In this project we study the aerodynamic performance of wing membranes with adaptive compliance.
Aeroelastic flapping wings:
The morphology, kinematics and stiffness properties of lifting surfaces play a key role in the aerodynamic performance of vertebrate flight. These surfaces, as a result of their flexible nature, may move both actively, owing to muscle contraction, and passively, in reaction to fluid forces. However, the nature and implications of this fluid–structure interaction are not well understood. We study passive flight (flight with no active wing actuation) using a simple physical model consisting of a cantilevered flat plate with a hinged trailing flap.
Direct simulation of freely swimming fish
Computational fluid dynamics is an extraordinary tool to study swimming and flying locomotion. We use a constraint-based formulation to simulate freely swimming organisms. We have used this computational method across different types of swimming modes and organisms, including zebrafish, jellyfish, and knifefish.