Autonomous submersible holographic imaging system
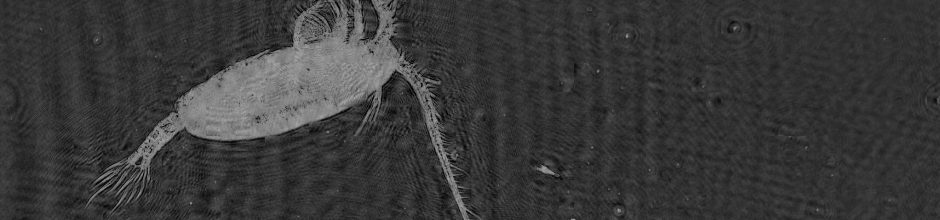
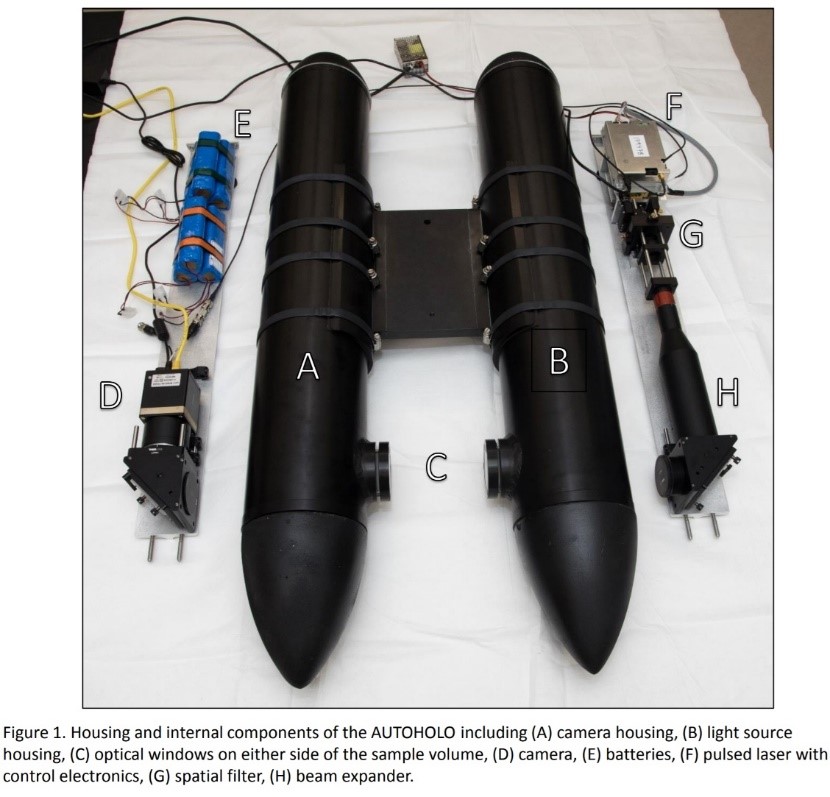
The AUTOHOLO is the first prototype developed by a team of researchers at FAU-HBOI, as part of an NSF OTIC funded project (Award #1634053) to design an autonomous submersible holographic imaging system suited for long-term in situ marine studies. The design consists of two cylindrical tubes (6” OD, 40” long), which are held together by a brace (see Figure 7, with housing and internal components laid out for presentation purposes). Overall, the AUTOHOLO weighs ~ 80 lbs in air. One of the cylindrical tubes contains the laser as well as beam expanding and aligning optics, while the other housing contains the camera, power supply, and other control electronics. The recording medium is a high resolution, 4920 x 3980 (16 MP) Imperx© camera, acquiring data at a frame rate of 3.2 Hz. The system is also modular with deployment possible in both a lens-less configuration as well as with a microscopic objective, leading to a resolution of 5.5 and 2.3 µm/pixel respectively. This corresponds to a resolvable particle size range of either 10 µm – 3.5 cm for the lens-less configuration, or 4.6 µm – 1.45 cm with the objective lens. An added advantage of the system design is the 12 cm sampling length between the two windows, which corresponds to a sampling volume of 12.4 mL and 71.4 mL per hologram respectively for the high and low magnification configurations. This is an order of magnitude higher than the volume sampled per hologram in commercially available holographic imagers (e.g., Sequoia Scientific’s LISST-HOLO and 4Deep’s holographic microscope). The large sample volume also allows for studying particles, bubbles and droplets in their natural environment, while minimizing breakage/dispersal. Data is stored onboard using 4 TB solid state hard drives. The instrument is programmable to either acquire data continuously, or in ‘burst’ mode, wherein it acquires data for a fixed period at regular intervals.
As part of the project, in-house hologram processing and reconstruction routines have been developed and successfully used (For further details, see Nayak et al., 2018). Parallel processing routines using GPUs in Matlab have been created to enable rapid hologram reconstruction and analysis. For example, reconstructing one hologram with the above resolution, in 500 µm depth planes over the entire 12 cm sample volume takes about 1 minute. Post-reconstruction analysis algorithms to create in-focus particles (including segregating planktonic species, bubbles, and detrital matter) and store a 3-D list also already exist (Nayak et al., 2018).
Currently, field testing is ongoing on the first prototype and the fabrication and design of a second prototype is well underway.
Funding: NSF Ocean Technology and Interdisciplinary Coordination (OTIC) Program (2016-2019).
References:
A.R. Nayak, M. McFarland, J. Sullivan and M. Twardowski, “Evidence for ubiquitous preferential particle orientation in representative oceanic shear flows,” Limnol. Oceanogr. 63(1), 122-143 (2018).
A.R. Nayak, M. McFarland, J. Sullivan and M. Twardowski, “On plankton distributions and biophysical interactions in diverse coastal and
limnological environments,” in Proc. SPIE, Ocean Sensing and Monitoring X, 10631, 106310P (2018).